Der große Schwimmkran
Ich habe dieses schöne Modell inzwischen 3 mal gebaut, wobei ich mich jedesmal um gezielte Verbesserungen bemühte. Ich muss an dieser Stelle gleich hinzufügen, dass ich weder Sammler bin noch Modelle baue, die in einer Vitrine ihr museales Dasein fristen. Ich baue um zu bauen, und da meine finanziellen Mittel und somit auch das Material begrenzt sind, baue ich die Modelle nach einigen Wochen oder Tagen wieder auseinander.
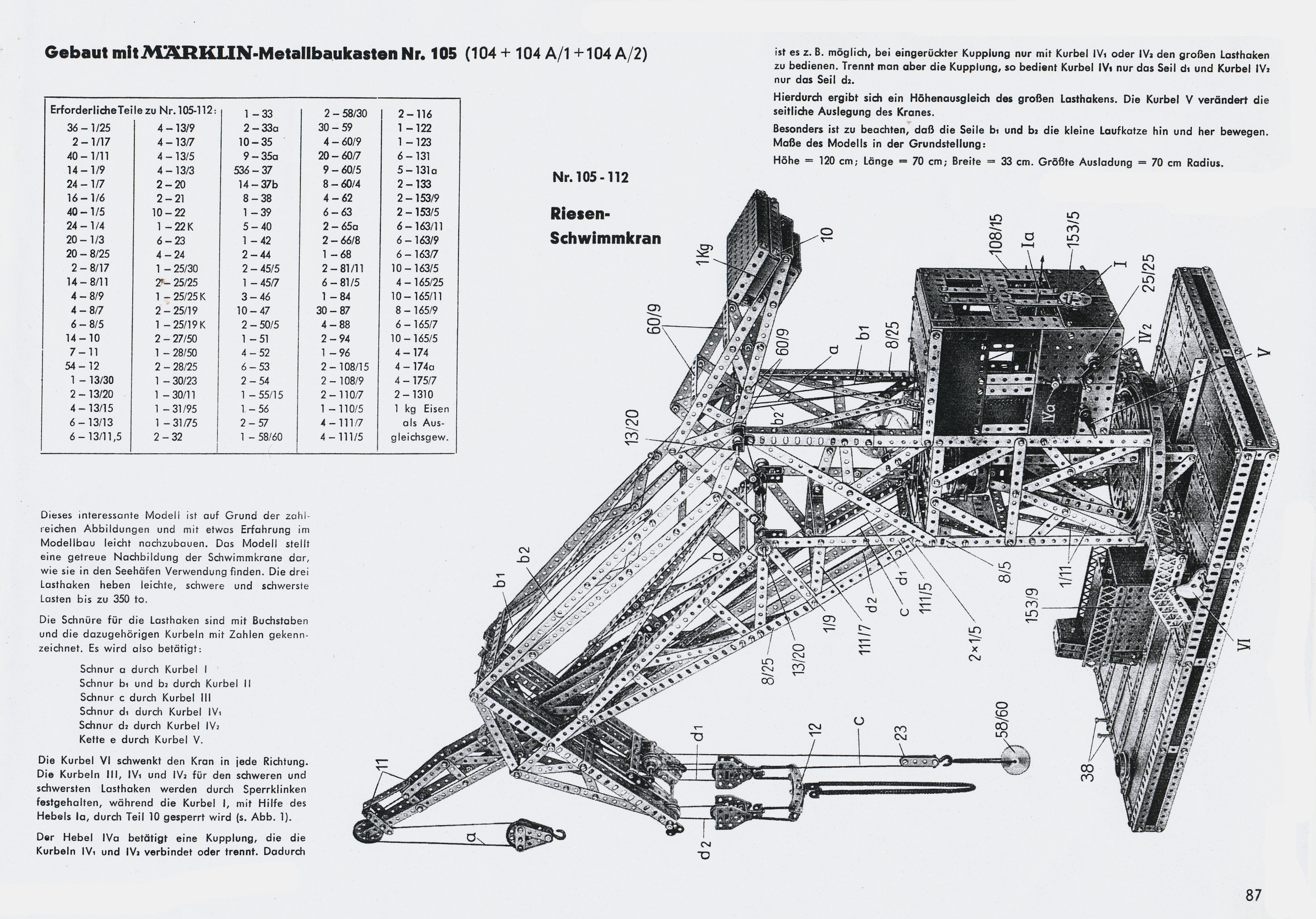
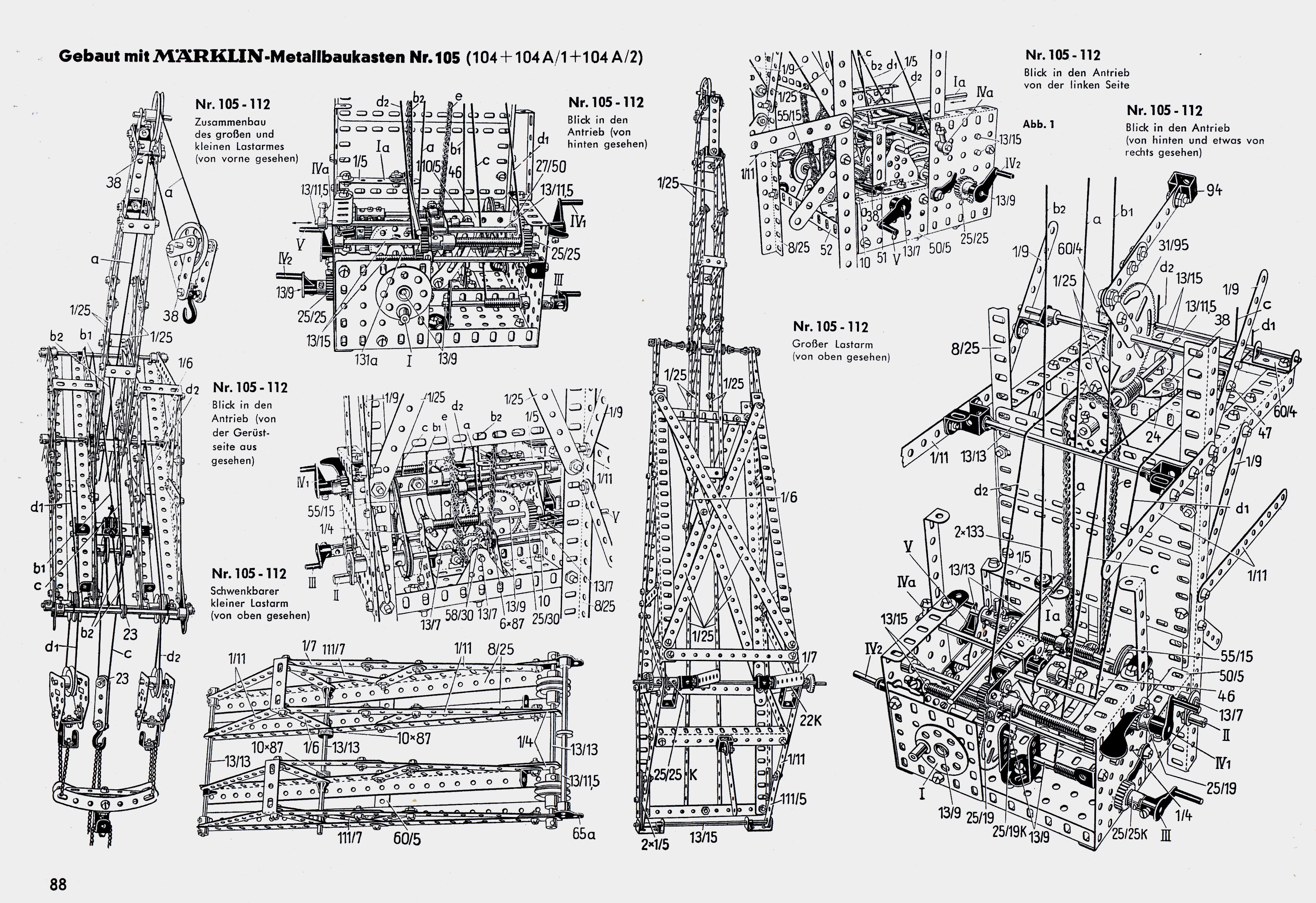
Das Modell orientiert sich weitgehend am Bauplan im Märklin-Bauheft der 50er Jahre. Die dreiseitige Bauanleitung kann hier heruntergeladen werden:
{kind=link}
{kind=link}
{kind=link}
Der 1. Nachbau
Beim ersten Versuch hielt ich mich weitgehend an den von Märklin herausgegebenen Bauplan. Ich wollte vor allem herausfinden, ob das alles wohl so funktioniert, wie es Märklin vorgegeben hatte. Skepsis war beim vorausgehenden Studium des Bauplans nämlich angesagt. Vor allem das Drehwerk zum Drehen des Krans um die Hochachse und das Einziehwerk zum Ein- und Ausfahren des Auslegers schienen mir - wie soll ich sagen - eher Wackelkonstruktionen zu sein.
Trotzdem baute ich getreulich nach. Das Drehen über die Mittelachse funktionierte irgendwie, oder, besser gesagt, es gelang, den drehbaren Teil mittels einer Kurbel in eine andere Richtung zu schaukeln. Zu den Hubwerken kam ich nicht mehr, denn beim Testen des Einziehwerkes war Schluss. Ich hatte das Gegengewicht und damit die Gesamtmasse bewusst niedrig gehalten, damit der Kran beim Drehen nicht so torkelte. Das hatte zur Folge, dass im Einziehwerk zwischen Schnecke und Zahnrad eine starke Reibung auftrat. Um diese zu reduzieren und das unerträgliche Quietschen zu vermeiden, gab ich einige Tröpfchen Öl auf die Schnecke. Nun ging's glatt, so glatt, dass das Zahnrad trotz zusätzlicher, kurzgefasster Halterung übersprang und der schwere Ausleger mit Getöse auf die Tischplatte herunterrasselte, ohne Rücksicht auf Kaffeetasse nebst Inhalt. Kurz: Ich war so frustiert, dass ich das halbfertige Modell noch am selben Tag wieder zerlegte. Es existieren auch keine Bilder von diesem ersten Bauversuch.
Der 2. Nachbau

Beim zweiten Mal einige Jahre später ging ich überlegter vor. Mir war inzwischen klar geworden, dass eine einigermaßen präzise und schwingfreie Drehung des schweren Kranaufbaus über die 4-mm-Mittelachse nicht wirklich funktionieren kann. Und da ich noch keine Möglichkeit sah, den äußeren Ring direkt anzutreiben, verzichtete ich auf die Drehung mittels Kurbel und drehte den Kran ganz einfach direkt mit der Hand. Das ging ganz gut, und das untere Drehlager mit dem großen Tellerrad innen und dem großen Ring außen arbeitete trotz des Schleifens sauber und erstaunlich reibungsarm. Andererseits erwies sich die geringe Restreibung als vorteilhaft, denn beim Betätigen der Kurbeln zu den Hubwerken geriet der Kran nicht übermäßig in Schwingungen. Sicherheitshalber hatte ich noch eine Bremse angebracht. [Anmerkung 1]
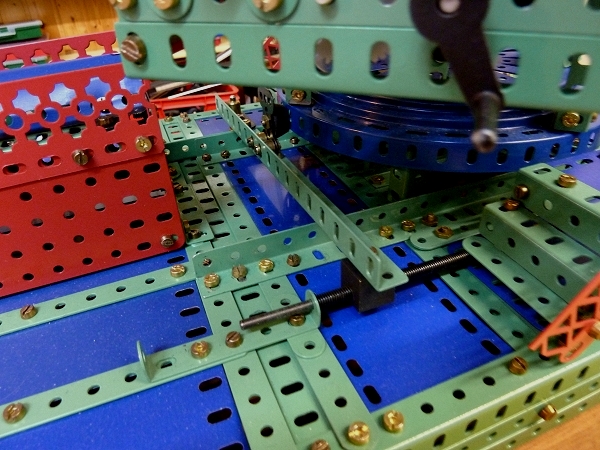
Die Bremse wird mittels einer Schraubspindel angezogen
Nachdem ich nun auf das Drehwerk verzichtete, konzentrierte ich mich ganz auf das Einziehwerk. Das Schneckengetriebe kam verständlicherweise nicht mehr in Frage. Ein Leser schlug zwar vor, den Ausleger mittels Gegengewicht sauber auszutrimmen, dann gebe es keine Probleme. Doch wie ich schon im Vorfeld vermutete, gilt die Trimmung nur für eine bestimmte Stellung des Auslegers. Für das Auslenken aus dieser Gleichgewichtsstellung sind in beidern Richtungen Kräfte erforderlich, die mir zu groß für das feingezahnte Schneckengetriebe schienen.
Also ging ich einen anderen Weg, indem ich den Ausleger mittels Flaschenzug (10 Rollen) bewegte. Dazu reduzierte ich wieder das Gegengewicht, so dass die Schwerkraft des Auslegers in jeder Stellung wirksam sein konnte. Und nun funktionierte auch das Einziehwerk wie gewünscht. Mit relativ geringem Kraftaufwand ließ sich der Ausleger bewegen. Als Bremse verwendete ich natürlich keine Sperrklinke (ein herunterrasselnder Ausleger reicht mir), sondern ein Sperrgetriebe mit Schleifbremse.
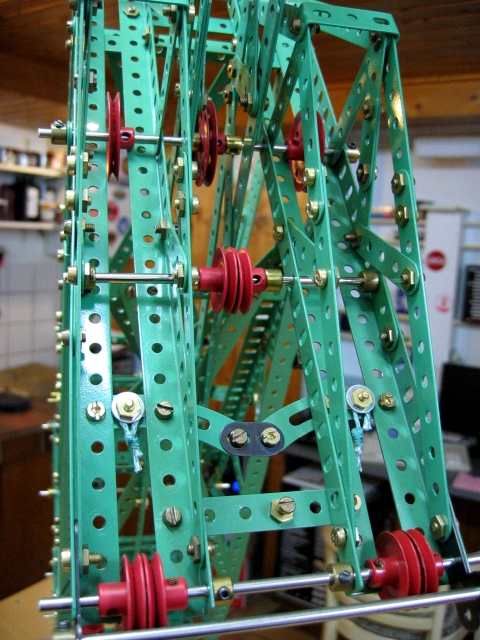
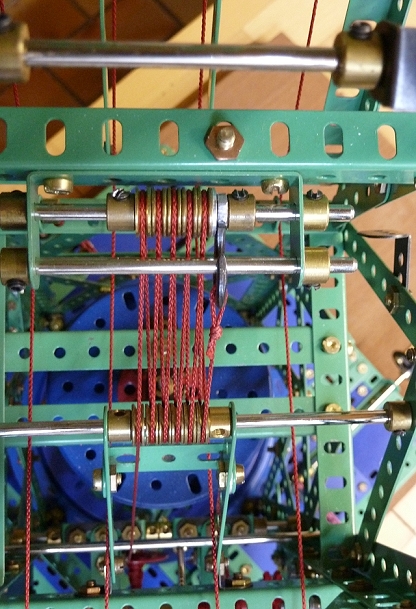 Ein Blick auf den Flaschenzug zum Einziehen des Auslegers. Diese Getriebeart arbeitet geräuschlos und geschmeidig, und auf die Schnur wirkt nur die aufzuwendende Kraft, nicht die Schwerkraft des Auslegers.
Ein Blick auf den Flaschenzug zum Einziehen des Auslegers. Diese Getriebeart arbeitet geräuschlos und geschmeidig, und auf die Schnur wirkt nur die aufzuwendende Kraft, nicht die Schwerkraft des Auslegers.
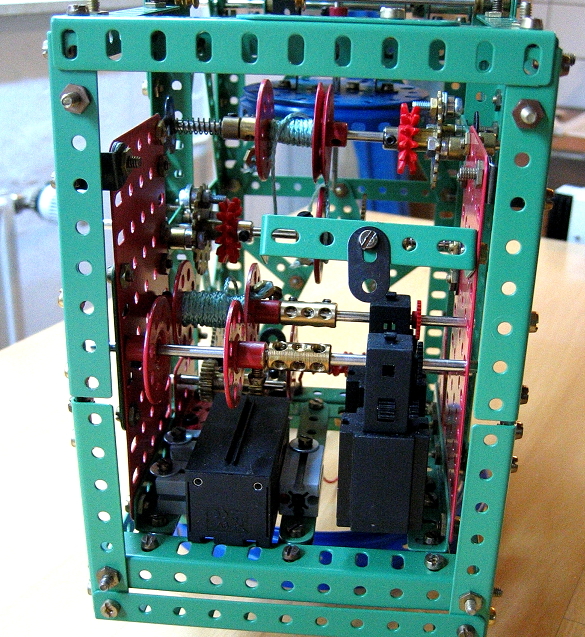
Das folgende Bild zeigt das Innere des Maschinenhauses. Unten die Kurbel gehört zum Einziehwerk; der Hebel unten links ist der Bremshebel. Er wird mit einer Zugfeder auf ein Gummirad gedrückt, das wiederum über ein Übersetzungsgetriebe mit dem Einziehwerk verbunden ist. Im Bild ist das nicht alles zu erkennen. Die weißen Zahnräder gehören nicht zum Bremswerk, sondern bilden ein Untersetzungsgetriebe, das dem Flaschenzug vorgeschaltet ist.
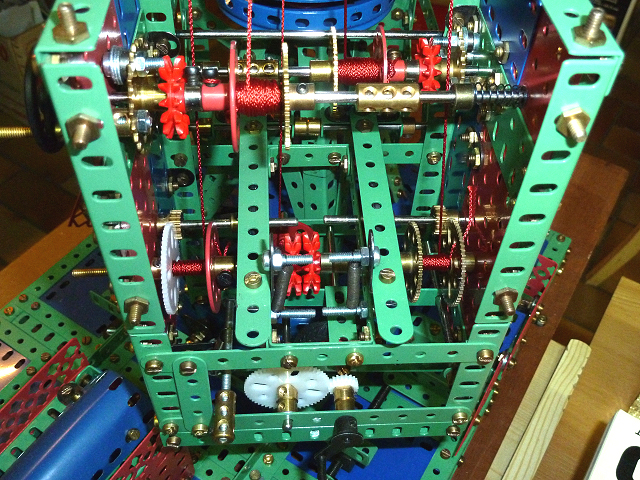
Die beiden Lochbänder darüber arbeiten nach einem ähnlichen Prinzip als Bremsen, in diesem Fall jedoch für die beiden Haupthubwerke. Die Zugfedern sind deutlich zu erkennen. Die beiden Universalzahnräder bilden eine Kupplung. Wenn der Hebel zum Entkuppeln nicht betätigt wird, werden beide Seilzüge gleichzeitig mit einer Kurbel bedient (was nicht bedeutet, dass immer völlige Synchronität vorliegt, leider).
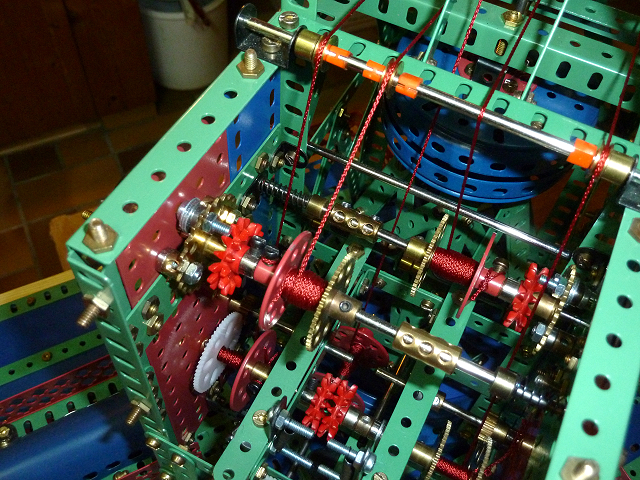
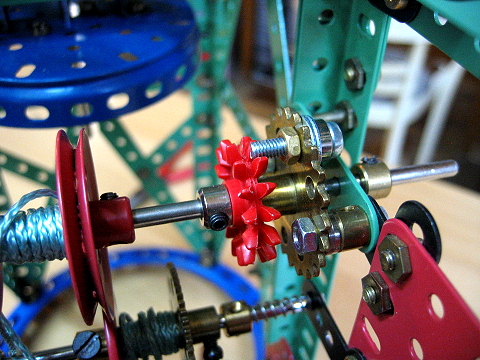
Für die beiden Hilfshubwerke habe ich wiederum einen anderen Weg gewählt. Auf jeden Fall sollten auch hier die auf Schwerkraft basierenden Sperrklinken vermieden werden. Das nächste Bild zeigt das Prinzip. Auf der Achse oben im Bild befindet sich rechts eine Feder, die das Universalzahnrad links gegen einen Zapfen, bestehend aus einer Schraube, drückt. Dadurch sperrt die Achse zuverlässig und vor allem sehr schnell. Um die Sperre zu lösen, wird die Kurbel einige Millimeter hineingedrückt. Beim Loslassen sperrt das Ganze dann erneut. Dahinter befindet sich der gleiche Mechanismus noch einmal, nur anders herum, und zwar für das andere Hilfshubwerk.
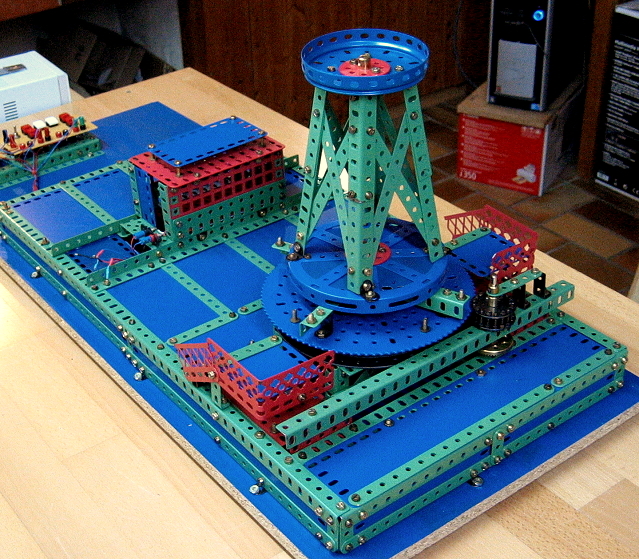
Wie beim großen Vorbild ist das pyramidenförmige, feststehende Stützgerüst von außerordentlicher Wichtigkeit für die Stabilität des Modells. Trotz der stabilen unteren Lagerung des drehbaren Teils (die beiden großen blauen Bauteile) war der Aufbau relativ leicht zum Schwanken zu bringen. Ich fand dafür zwei Ursachen. Da war zum einen die obere Lagerung auf dem Stützgerüst. Die beiden blauen Räder hatten keine Funktion, aber das Stützgerüst und die drehbare Glocke waren (lagermäßig) zu weit voneinander entfernt, etwa 3 cm. Für eine 4-mm-Achse ist das zu viel. Folglich habe ich die Lagerung durch zusätzliche Lochscheibenräder gestrafft.
Die andere Ursache bestand in der Befestigung des Stützgerüstes auf dem Ponton. Die Winkelschienen erwiesen sich einfach als zu schwach und nachgiebig. Deshalb habe ich das "Fundament" etwas umgebaut und dabei die Winkelschienen doppelt genommen und noch zusätzlich verstrebt. Nach diesen Maßnahmen war die gewünschte Stabilität erreicht.
Von außen wirkt das Maschinenhaus mit den Kurbeln an drei Seiten irgendwie zusammengestückelt. Der obere Teil der Rückwand sowie die Platte auf der Oberseite können zwar abgenommen werden, aber die Seiten sind endgültig verschlossen. Das hängt damit zusammen, dass die Seitenflächen als Lager für die Kurbelachsen dienen. Das kann man natürlich besser machen, indem zunächst der komplette Mechanismus ohne Verkleidung rundherum aufgebaut wird. Anschließend kann man überlegen, wie die Verkleidung gestaltet wird, damit die Kurbelachsen nach außen ragen.
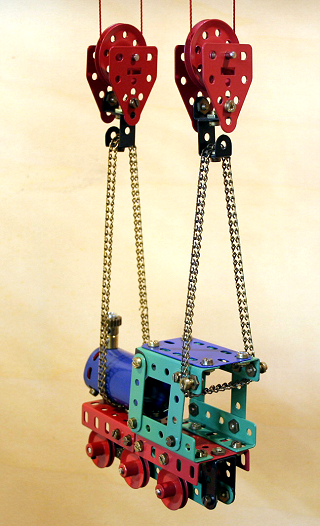
Damit der Kran auch etwas zu tragen hatte, baute ich noch eine kleine Lok dazu. Ok, sie ist nicht schön, sondern eher putzig. Außerdem ist sie - maßstäblich gesehen - um den Fakter 1,8 zu groß geraten. Aber mit Schwerlastgütern wie U-Booten oder Eisenbahnwaggons mussten sich die großen Vorbilder ja herumplagen.
Der 3. Nachbau
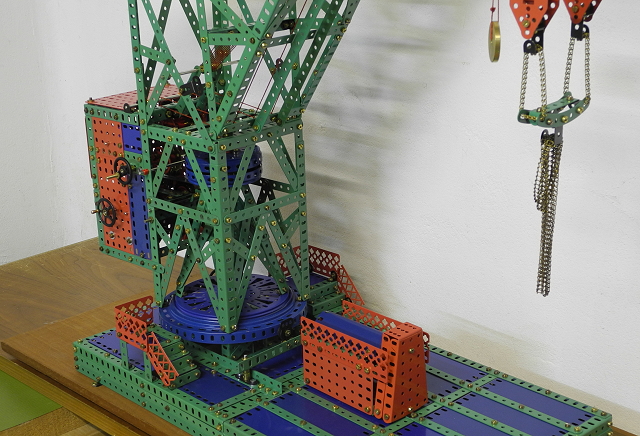
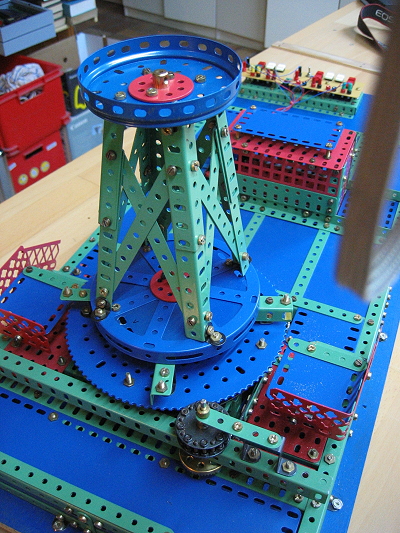
Das Bild, das den Kran als Ganzes zeigt, entstand im örtlichen Heimatmuseum, bevor die Besucher kamen.

Beim 3. Nachbau gab es wieder andere Prioritäten. Diesmal sollte der Kran auf jeden Fall ein funktionierendes Drehwerk erhalten. Die Methode, den Ausleger über einen Flaschenzug anzusteuern, hatte sich dagegen bewährt und sollte erneut umgesetzt werden. Die wesentliche Änderung bestand darin, dass der neue Kran weitgehend motorisiert sein sollte. Ich stellte also die verfügbaren Elektromotoren zusammen und wies ihnen ihre Aufgabe zu:
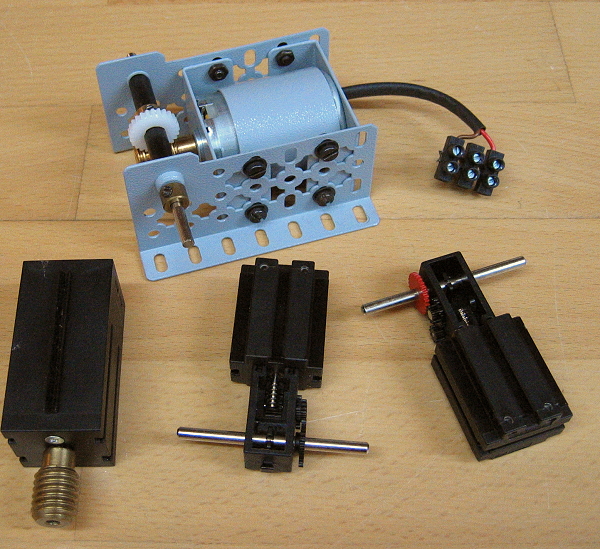
Der Metallus-Motor konnte wegen der Größe nicht im Maschinenhaus untergebracht werden, also kam für ihn nur das Drehwerk in Frage, denn im Ponton war genügend Platz. Die beiden kleinen Fischertechnik-Motoren unten sollten die beiden Haupthubwerke übernehmen, und der größere Fischertechnik-Motor unten links war demnach für das Ausleger-Einziehwerk zuständig. Ich will gleich vorausschicken, dass der letztgenannte Motor der einzige war, der bis an seine Leistungsgrenze gehen musste. Er musste sogar mit 12 V betrieben werden, obwohl er für etwa 9 V ausgelegt ist.
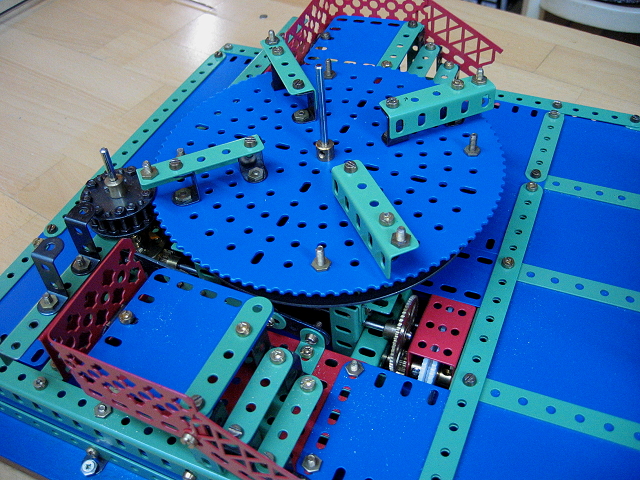
Die entscheidende Frage war nun, wie der Mechanismus zum Drehen aussehen sollte. Das Ganze musste schon einigermaßen präzise gebaut sein, also sowohl leichtgängig als auch stabil sein. Da kam letzten Endes nur das Rollenlager von Metallus in Frage. Zwischen zwei stabilen, runden Metallplatten werden 16 Kugeln lose gelagert, so dass die Vorrichtung eine Art Kugellager darstellt. Das folgende Bild zeigt die montierte, untere Platte:
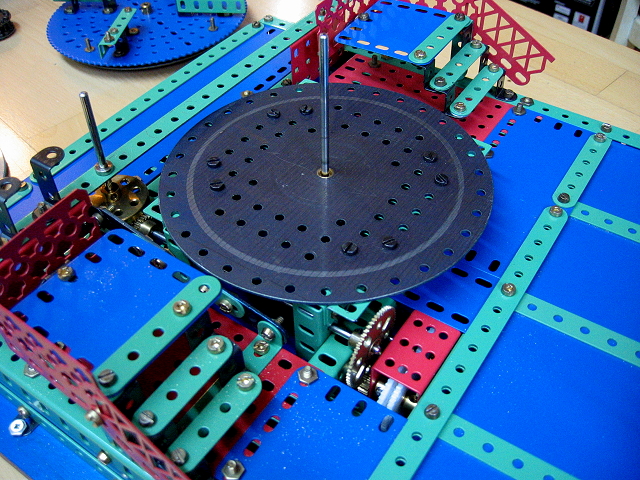
Alle Detailbilder vom Kran wurden beim Auseinanderbauen aufgenommen. So erkennt man auf der Platte die Spur, die die Kugeln hinterlassen haben. Ferner sind auf den blauen Verkleidungsplatte kleine Metallpartikel zu erkennen, zurückzuführen auf den Abrieb.
 Im diesem Bild sieht man die aufgelegten Kugeln mitsamt der losen Führungsscheibe aus Kunststoff.
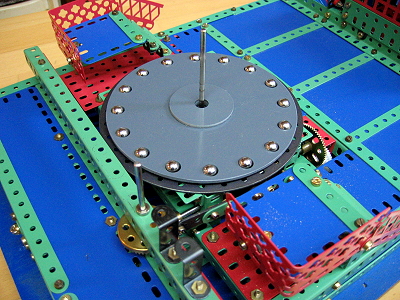
Im diesem Bild sieht man die aufgelegten Kugeln mitsamt der losen Führungsscheibe aus Kunststoff.Im Bild unten ist das fertig montierte Rollenlager mit dem Antriebsrad zu sehen.
Die obere Platte des Rollenlagers ist mit einem großen Kettenrad verschraubt, das wiederum von einem speziellen Antriebsrad (ebenfalls Metallus) angetrieben wird.
Als nächstes ein Blick auf die Unterseite des Pontons. Man sieht den Elektromotor, der über eine Kardanwelle mit dem Getriebe verbunden ist.
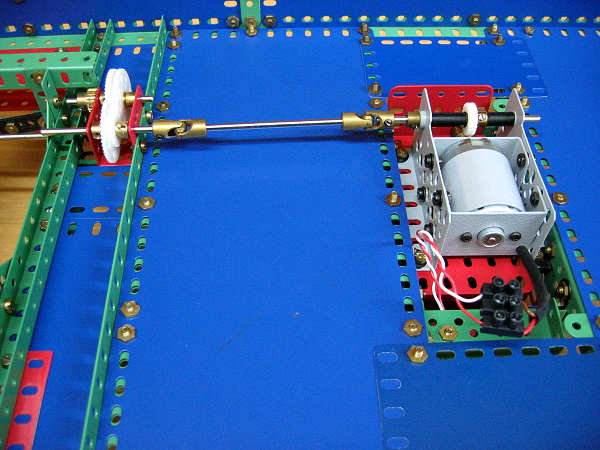
 Hinter dem dreistufigen Untersetzungsgetriebe befindet sich noch eine weitere Stufe, denn aus verschiedenen Gründen muss die Drehung des Krans sehr langsam erfolgen.
Hinter dem dreistufigen Untersetzungsgetriebe befindet sich noch eine weitere Stufe, denn aus verschiedenen Gründen muss die Drehung des Krans sehr langsam erfolgen.
Schließlich geht es über eine Ritzel-Kronrad-Kombination auf die Achse mit dem eigentlichen Antriebsrad.
 Aus dem Stützgerüstkran war somit ein Drehscheibenkran geworden. Doch was war mit dem überflüssigen Stützgerüst? Nun, einfach weglassen ging nicht, denn dann fehlte dem Modell ein wesentlicher Bestandteil. Folglich musste eine Stützgerüst-Attrappe eingebaut werden.
Aus dem Stützgerüstkran war somit ein Drehscheibenkran geworden. Doch was war mit dem überflüssigen Stützgerüst? Nun, einfach weglassen ging nicht, denn dann fehlte dem Modell ein wesentlicher Bestandteil. Folglich musste eine Stützgerüst-Attrappe eingebaut werden.Das Stützgerüst ist nur an der Mittelachse befestigt, die wiederum fest mit dem Ponton verbunden ist. Das Gerüst deht sich also nicht mit. Die Vorrichtung wackelt zwar, erhält aber die gewünschte Stabilität, wenn der Kran aufgesetzt ist und oben in die Attrappe hineingreift.
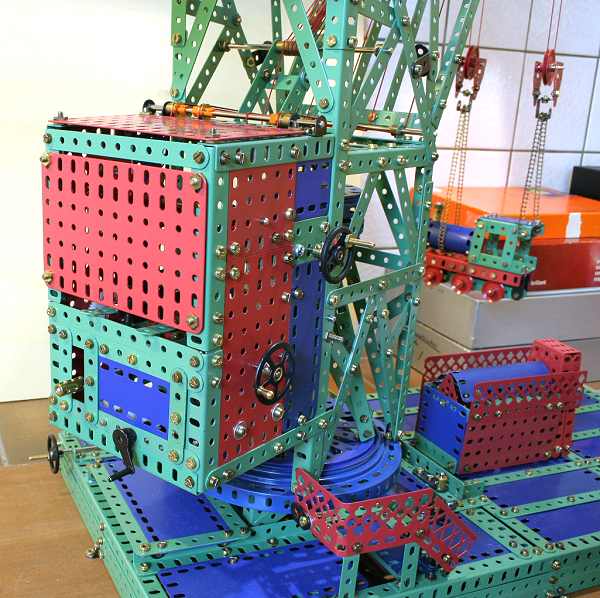
Nun ein Blick in das Maschinenhaus. Verglichen mit dem Vorgängermodell wirkt das Innere geradezu langweilig. Kein Wunder, durch die Motoren konnte der mechanische Aufwand deutlich reduziert werden.
Rechts sieht man die beiden kleinen Fischertechnik-Motoren für die Haupthubwerke. Sie sind ganz einfach an den Achsen aufgehängt, und unten sorgen kleine Sperren dafür, dass sie sich nicht drehen. Die Montage des Einziehmotors links dagegen erforderte einigen Aufwand. Ein Überspringen der Schnecke musste unbedingt verhindert werden, denn dann wäre ein ähnlicher Schlamassel eingetreten wie beim 1. Modell. Sicher, der Flaschenzug hätte den Fall gebremst, aber trotzdem ... Darüber befinden sich die Antriebe für die Hilfshubwerke, auf altbewährte Weise mit Kurbeln zu bedienen.
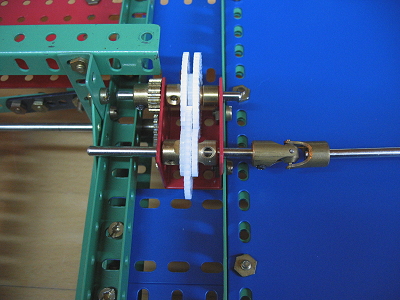
 Das folgende Bild zeigt den Sperrmechanismus für die Kurbelachse aus der Nähe. Man sieht auch, dass die Achsen nicht in den Außenplatten gelagert sind. Somit ist es möglich, das Maschinenhaus jederzeit offen zu legen.
Das folgende Bild zeigt den Sperrmechanismus für die Kurbelachse aus der Nähe. Man sieht auch, dass die Achsen nicht in den Außenplatten gelagert sind. Somit ist es möglich, das Maschinenhaus jederzeit offen zu legen.
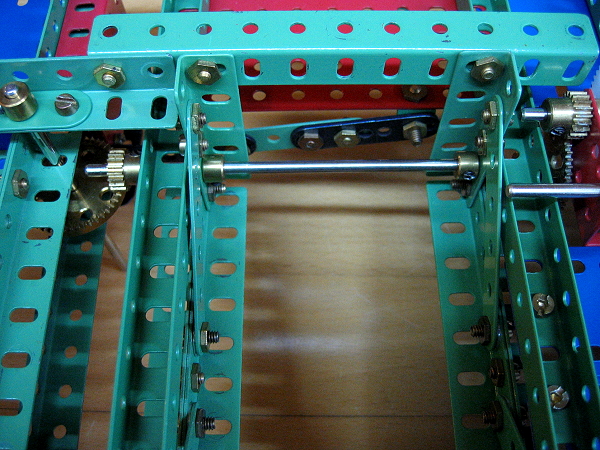
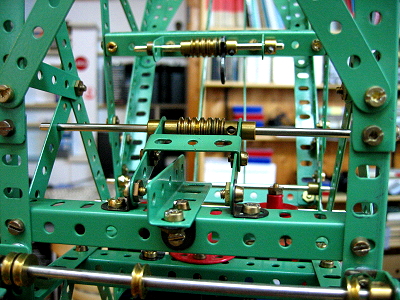 Die lange Achse für die festen Rollen des Flaschenzugs muss dicht an den Rollen zusätzlich gelagert werden, sonst biegt sie sich.
Die lange Achse für die festen Rollen des Flaschenzugs muss dicht an den Rollen zusätzlich gelagert werden, sonst biegt sie sich.
Der Blick auf den Spitzenausleger lässt an Hand der Rollen erkennen, wie die Seile laufen. Die Seilführung weicht stark von der Märklin-Vorlage ab.
Ach ja, der erste Schritt bei der Demontage bestand darin, die Schnüre abzuchneiden. Man sieht's.
Ich gebe übrigens auf jeden Knoten ein kleines Tröpfchen Sekundenkleber. Der zieht in den Knoten und macht daraus ein kleines, hartes Klümpchen. Der Knoten kann sich nicht mehr lösen. Ein kleiner Tipp am Rande.
Nun noch einen Blick auf den gesamten, fertig montierten Ponton. Unter dem Schuppen oder was immer das sein soll, befindet sich der Motor für die Drehung des Krans.
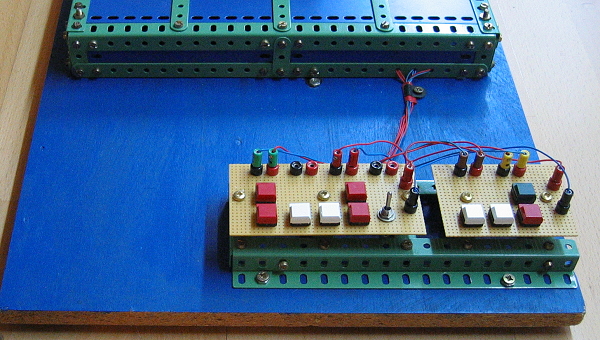
Die kleine Schaltereinheit mit jeweils zwei Tasten für eine Motorfunktion hat sich schon bei diversen Modellen bewährt:
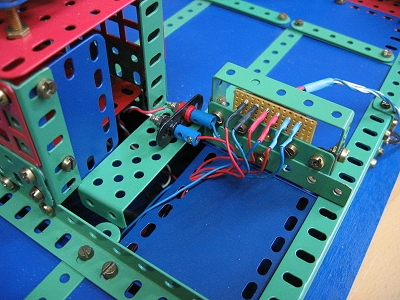 Dieses ist die Verbindungsstelle, die das flexible, am drehbaren Teil des Krans befestigte Mehrfachlitze mit der Schaltereinheit verbindet. Natürlich sind alle Verbindungen steckbar (Löstifte und Lötschuhe, die mit Schrumpfschlauch überzogen sind).
Dieses ist die Verbindungsstelle, die das flexible, am drehbaren Teil des Krans befestigte Mehrfachlitze mit der Schaltereinheit verbindet. Natürlich sind alle Verbindungen steckbar (Löstifte und Lötschuhe, die mit Schrumpfschlauch überzogen sind).
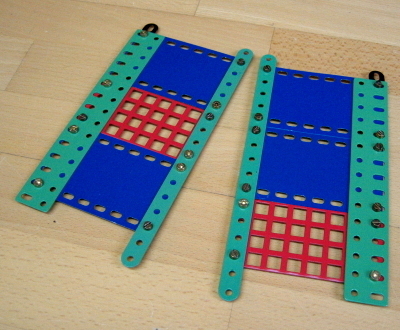
Am Schluss erhält das Maschinenhaus die Außenverkleidung, die einfach mit Muttern befestigt wird. Das Bild zeigt die beiden Seitenteile.
Der 4. Nachbau
Also, den gibt es wahrscheinlich erst in einigen Jahren. Aber es steht schon fest, was erneut anders sein wird:
- Das Modell wird vollmotorisiert werden. Es werden 6 Motoren drin stecken, vielleicht sogar 7, wenn es gelingt, die mittlere Hilfsflasche über eine Laufkatze zu steuern.
- Das Modell wird wieder mit einem richtigen Stützgerüst ausgestattet sein. Für die Probleme habe ich bereits Lösungen gefunden. Mit Hilfe von 4 kleinen Kugellagern kann sich der Druckring nahezu spielfrei und dennoch leichtgängig um die Druckplatte drehen, und der Außenantrieb ist durch zusätzliche Bohrungen im Flansch des großen, blauen Rings ebenfalls gesichert.
- Der Ausleger wird wie beim großen Kran mittels einer Gewindespindel bewegt werden. Dass ich da nicht eher drauf gekommen bin, ärgert mich ein wenig, es liegt doch so nahe.
Anmerkungen
[1] Schwingungen oder ruckartige Bewegungen entstehen vor allem dann, wenn eine größere Masse bewegt wird und der Antrieb nicht spielfrei ist, so dass die Masse wegen ihrer Trägheit innerhalb einer gewissen Hysterese unkontrollierte Eigenbewegungen durchführen kann. In solchen Fällen hilft nach meiner Erfahrung eine Dämpfung, sei es durch natürliche Reibung oder durch eine leichte Bremse. Diese Dämpfung muss aber unbedingt auf das letzte Glied der Getriebekette wirken. Im Falle des drehbaren Krans ist das der Ring am unteren Ende der Kranglocke, also der Druckring.